本文版权归作者所有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。
转载自夜明的孤行灯
先说一下,为什么题目是简单实现,因为我实在没有弄出好的例子。
我原来用AForge.net做的项目中的模糊系统融入了神经网络和向量机,没法抽出来当例子,就用了个最老的自动车辆的例子。
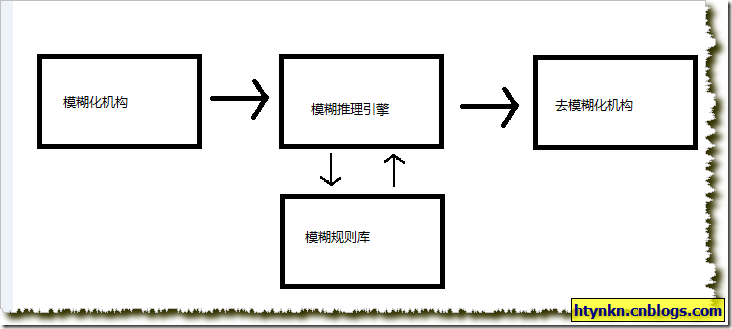
模糊系统(Fuzzy System)架构
前面零零散散说来一下有关模糊系统和模糊理论的东西,这里来个总结。
模煳系统的基本架构如图8.1所示,其中主要的功能方块包括:(1)模煳化机构、(2)模煳规则库、(3)模煳推论引擎、以及(4)去模煳化机构。
模糊化机构是有关模糊集合和隶属度函数的内容。
模糊规则前文也有提及,去模糊化只涉及了重心法一种,这里简单说一下模糊推理引擎。
模糊推理引擎是模煳系统的核心,它可以藉由近似推论或模煳推论的进行,来模拟人类的思考决策模式,以达到解决问题的目地。
比如:
前提(premise)一:x is A’
前提(premise)二:if x is A,y is B
结论:y is B’

模糊推理系统的简单实现
在AForge.Net中的对应类是InferenceSystem。
在程序实现中一个模糊推理系统(Fuzzy Inference System )由数据库(Database)和规则库(Rulebase)组成,一般操作如下:
1.获取数值输入
2.通过数据库(Database)将数值输入转为语意含义
3.验证规则库(Rulebase)中的哪些规则被输入激活
4.组合被激活的规则,得到模糊输出(Fuzzy Output)
5.去模糊化(实现IDefuzzifier接口)
下面看看例子,这个例子是关于控制车辆避免正面冲撞的系统。
输入为距离,论域[0,120],隶属度函数

输出为角度,论域[-10,50],隶属度函数

核心代码:
// 隶属度函数(距离) FuzzySet fsNear = new FuzzySet("Near", new TrapezoidalFunction(15, 50, TrapezoidalFunction.EdgeType.Right)); FuzzySet fsMedium = new FuzzySet("Medium", new TrapezoidalFunction(15, 50, 60, 100)); FuzzySet fsFar = new FuzzySet("Far", new TrapezoidalFunction(60, 100, TrapezoidalFunction.EdgeType.Left));//绘制图像 int length1 =(int) (chart1.RangeX.Max - chart1.RangeX.Min); double[,] NearValues = new double[length1, 2]; for (int i = (int)chart1.RangeX.Min; i < chart1.RangeX.Max; i++) { NearValues[i, 0] = i; NearValues[i, 1] = fsNear.GetMembership(i); } double[,] MediumValues = new double[length1, 2]; for (int i = (int)chart1.RangeX.Min; i < chart1.RangeX.Max; i++) { MediumValues[i, 0] = i; MediumValues[i, 1] = fsMedium.GetMembership(i); } double[,] FarValues = new double[length1, 2]; for (int i = (int)chart1.RangeX.Min; i < chart1.RangeX.Max; i++) { FarValues[i, 0] = i; FarValues[i, 1] = fsFar.GetMembership(i); } chart1.UpdateDataSeries("Near", NearValues); chart1.UpdateDataSeries("Medium", MediumValues); chart1.UpdateDataSeries("Far", FarValues);// 距离(输入) LinguisticVariable lvFront = new LinguisticVariable("FrontalDistance", 0, 120); lvFront.AddLabel(fsNear); lvFront.AddLabel(fsMedium); lvFront.AddLabel(fsFar);// 隶属度函数 FuzzySet fsZero = new FuzzySet("Zero", new TrapezoidalFunction(-10, 5, 5, 10)); FuzzySet fsLP = new FuzzySet("LittlePositive", new TrapezoidalFunction(5, 10, 20, 25)); FuzzySet fsP = new FuzzySet("Positive", new TrapezoidalFunction(20, 25, 35, 40)); FuzzySet fsVP = new FuzzySet("VeryPositive", new TrapezoidalFunction(35, 40, TrapezoidalFunction.EdgeType.Left));//绘制图像 int length2 = (int)(chart2.RangeX.Max - chart2.RangeX.Min); double[,] ZeroValues = new double[length2, 2]; for (int i = (int)chart2.RangeX.Min; i < chart2.RangeX.Max; i++) { ZeroValues[i + 10, 0] = i; ZeroValues[i + 10, 1] = fsZero.GetMembership(i); } double[,] LittlePositiveValues = new double[length2, 2]; for (int i = (int)chart2.RangeX.Min; i < chart2.RangeX.Max; i++) { LittlePositiveValues[i + 10, 0] = i; LittlePositiveValues[i + 10, 1] = fsLP.GetMembership(i); } double[,] PositiveValues = new double[length2, 2]; for (int i = (int)chart2.RangeX.Min; i < chart2.RangeX.Max; i++) { PositiveValues[i + 10, 0] = i; PositiveValues[i + 10, 1] = fsP.GetMembership(i); } double[,] VeryPositiveValues = new double[length2, 2]; for (int i = (int)chart2.RangeX.Min; i < chart2.RangeX.Max; i++) { VeryPositiveValues[i + 10, 0] = i; VeryPositiveValues[i + 10, 1] = fsVP.GetMembership(i); } chart2.UpdateDataSeries("Zero", ZeroValues); chart2.UpdateDataSeries("LittlePositive", LittlePositiveValues); chart2.UpdateDataSeries("Positive", PositiveValues); chart2.UpdateDataSeries("VeryPositive", VeryPositiveValues);//角度 LinguisticVariable lvAngle = new LinguisticVariable("Angle", -10, 50); lvAngle.AddLabel(fsZero); lvAngle.AddLabel(fsLP); lvAngle.AddLabel(fsP); lvAngle.AddLabel(fsVP);//设置数据库 Database fuzzyDB = new Database(); fuzzyDB.AddVariable(lvFront); fuzzyDB.AddVariable(lvAngle);// 创建模糊推理系统 InferenceSystem IS = new InferenceSystem(fuzzyDB, new CentroidDefuzzifier(1000));// 直行规则 IS.NewRule("Rule 1", "IF FrontalDistance IS Far THEN Angle IS Zero"); // 左转规则 IS.NewRule("Rule 2", "IF FrontalDistance IS Near THEN Angle IS Positive");//开始推理// 设定输入 IS.SetInput("FrontalDistance",float.Parse(inputBox.Text));//打印输出 try { float newAngle = IS.Evaluate("Angle"); outputBox.Text = newAngle.ToString(); } catch (Exception ex) { MessageBox.Show("error ===> "+ex.Message); }
效果:



如果要输出模糊结论可以使用:
FuzzyOutput fuzzyOutput = IS.ExecuteInference("Angle");foreach (FuzzyOutput.OutputConstraint ocin fuzzyOutput.OutputList) { Console.WriteLine(oc.Label +" - " + oc.FiringStrength.ToString()); }

模糊推理系统的扩展和完善
借助AForge.Net我们可以很快构建一个系统,但是AForge.Net也不是十全十美的。
首先它的合成运算子没有实现完全,有些常用的,比如最大边界算子就没有。
其次其去模糊化的实现只有一种,可以考虑实现自己补充一下算法:
1.最大平均法 (modified mean of maxima defuzzifier)

2.修正型最大平均法 (modified mean of maxima defuzzifier)

3.中心平均法 (modified center average defuzzifier)
4.修正型重心法 (modified center average defuzzifier)

5.权重式平均法(weighted average method)结合了启动强度,使用更为广泛

不过AForge.Net的接口和设计比较好,扩展也是很方便的。
其实模糊系统的话,matlab也是可以做到的,但是一来matlab不开源,二来扩展确实不方便,所以没有使用,如果确实没有替代品,可以考虑混编。
模糊系统的使用本身也有一些不方便,主要是规则库的建立。
第一种也是最直接的方式就是经由询问人类专家而得。但是人类专家往往无法完整地提供所有必需的语意式模煳规则,以致于规则库的不完全。
而模糊系统的效果主要受规则和隶属度函数影响,所以有时候规则库的不全对系统的效果是毁灭性伤害。
第二种取得语意式模煳规则的方式,则是经由训练法则,从数值型资料(numerical data)中取得模煳规则,此种作法往往牵涉如何分割输入及输出变数空间。常用的就是神经网络。
AForge.Net也有神经网络相关的东西,所以使用起来很方便的。
最后附上整个项目的下载地址:http://www.ctdisk.com/file/4512079
本文版权归作者所有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。
转载自夜明的孤行灯